


Section: Software
ViSP: a visual servoing platform
Participants : Fabien Spindler [correspondant] , Filip Novotny, Eric Marchand, François Chaumette.
Since 2005, we develop and release under the terms of the GPLv2 licence, ViSP, an open source library that allows fast prototyping of visual tracking and visual servoing tasks. ViSP was designed to be independent with the hardware, to be simple to use, expandable and cross-platform.
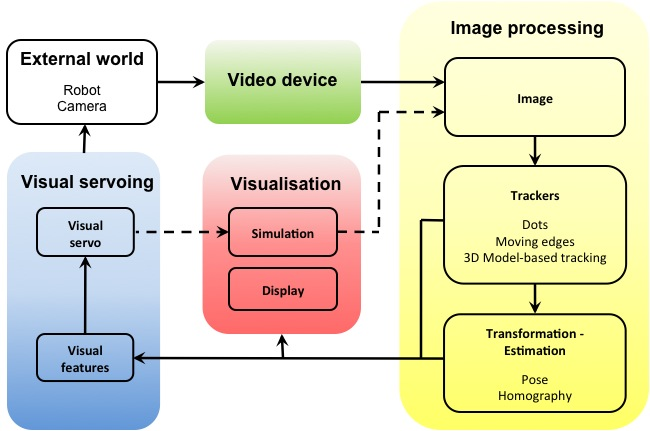
ViSP allows to design vision-based tasks for eye-in-hand and eye-to-hand visual servoing that contains the most classical visual features that are used in practice. It involves a large set of elementary positioning tasks with respect to various basic visual features (points, straight lines, circles, spheres, cylinders, frames, image moments...) that can be combined together, and image processing algorithms that allows tracking of visual cues (dots, segments, ellipses,...) or tracking of 3D model-based objects. Simulation capabilities are also available. ViSP and its full functionalities are presented in Fig. 1 and described in [7] .
This year, we continued to improve the software and documentation quality. A new version available at http://www.irisa.fr/lagadic/visp/visp.html was released in October 2011. To ease ViSP installation, we provide also precompiled ViSP SDK including pre-built ViSP library and headers.
This last release code has been downloaded 400 times during the first month of availability. It is used in research labs in France, USA, Japan, Korea, India, China, Lebanon, Italy, Spain, Portugal, Hungary, Canada. For instance, it is used as a support in a graduate course delivered at MIT, at IFMA Clermont-Ferrand and ESIR Rennes engineer schools. ViSP is now also a ROS stack and ViSP 3D model-based tracker has been proposed by the community as a ROS package (see http://www.ros.org/wiki/vision_visp ).